联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号
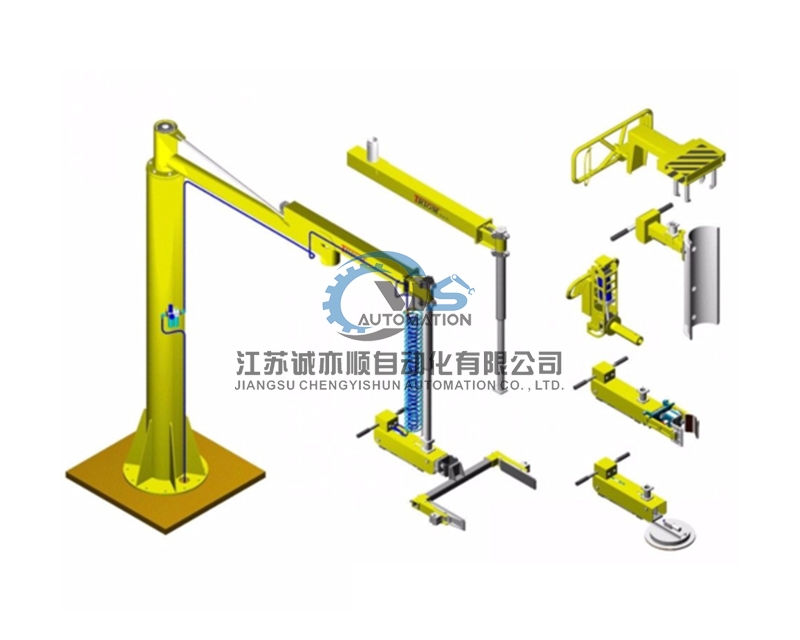
助力机械手又称机械手、平衡起重机和手动装载机,是节省物料输送时间和精力的新型助力设备。巧妙运用力平衡原理,使操作人员能够相应地推拉重物,在有限的空间内平衡运动和定位,省力。当重物被提升或降低时,不需要熟练的点动操作就可以形成提升条件。
可分为软索式助力机械手、硬墙式助力机械手和自约束省力吊具。由于非标准设备的特点,在选择或计划制造此类设备时,需要结合现场工作条件和工艺要求,以更接近操作人员的实际需要。
使用气动助力机械手可以降低操作人员的劳动强度,保证设备和操作人员的安全。助力机械手操作简单,使用安全,保护方便灵活,适用于储存占用、零件加工车间材料转移、自动化生产线装配定位等应用。
在助力机械手的气动控制中,主要由三个气动回路操作。这三个电路是:
1、操控回路
操控回路中的双气控两位五通阀是主操作阀,具有换向作用。当夹紧按钮启动时,空气通过夹紧侧的空气控制口反转双空气控制阀,夹紧活塞杆伸出,夹紧工件。当空气通过释放侧的空气控制口重置双空气控制阀时,夹紧缸杆缩回,工件释放。用调速阀(排气节流阀式)夹紧气缸的进气口和出气口,以调节夹紧气缸的运动速度。
2、制动回路
制动电路由机械臂关节处的三个制动缸完成,用单个气动控制两个五通阀完成换向,控制缸的压力和释放,完成系统的制动和偏差。该阀的空气控制口由制动旋钮控制。
3、翻转回路
翻转回路由单个气动控制两位五通阀完成,然后完成翻转气缸的效果,使工件从水平翻转到水平或从水平翻转到水平。该阀门的气动控制端口由旋钮控制。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号