联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号
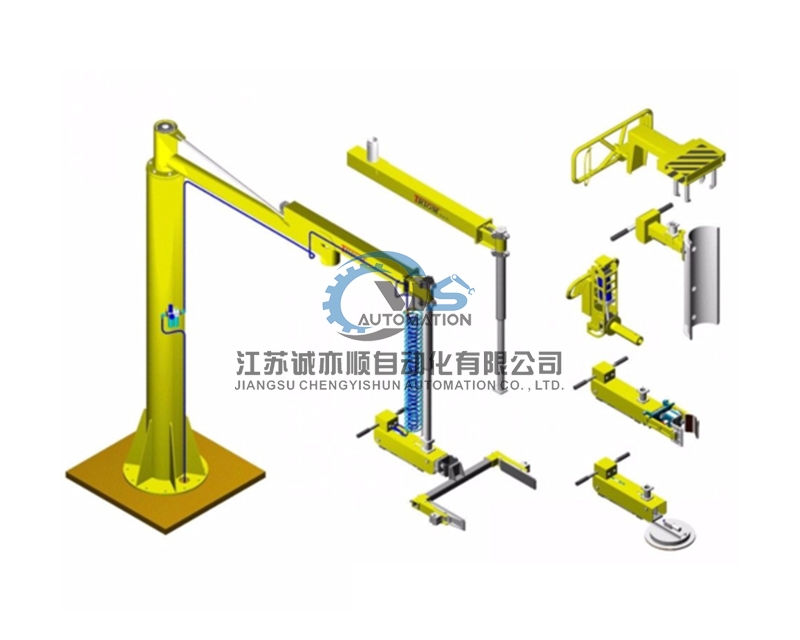
气动助力机械手,又叫气动机械手或气动抓手,是一种通过空气压力来控制机械手运动的装置。它广泛应用于工业生产中的物料搬运、装配、加工等环节,提高了生产效率和品质。而气动机械手的走线方式则是指机械手怎样在制定好的路径上运动,下面我们来详细了解一下。
1. 直线型走线方式
直线型走线方式就是机械手沿着直线轨迹运动。这种走线方式简单明了,而且易于控制,因此被广泛采用。通常情况下,直线型走线方式是在机械手的机械臂上设置几个气动缸,根据气动缸的活塞来控制机械臂的伸缩与收缩,从而使机械手在直线轨迹上运动。
2. 弧形走线方式
弧形走线方式就是机械手沿着弧线轨迹运动。这样的走线方式可以使机械手能够在一段时间内保持恒速运动,降低运动过程中的运动惯性和运动速度的突变。通常,在机械手的机械臂上设置的气动缸是采用对称式安装的,并配合气动控制阀来控制气动缸的工作状态,从而使机械臂沿着弧形轨迹运动。
3. 缓冲式走线方式
缓冲式走线方式是根据机械手的工作状态,采用不同的轨迹,来避免机械手在工作中受到过大的冲击和振动。在这种走线方式中,通常会设置缓冲装置来减缓机械手的冲击,并保护机械手设备的稳定性和寿命。此外,缓冲式走线方式还可以降低工作过程中的噪音和振动,从而提高工作环境的舒适性和安全性。
总的来说,气动机械手的走线方式是根据不同的工作场合和需求,结合设备的特点和技术要求,来设计和实现的。在实际应用中,气动机械手可以采用多种走线方式,如直线型、弧形型、缓冲型等,以满足工作的不同需求和要求。同时,随着科技的不断发展和进步,越来越多的新型走线方式和机械手控制技术也不断涌现,为机械手的应用和发展带来了更多的可能和空间。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号