联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号
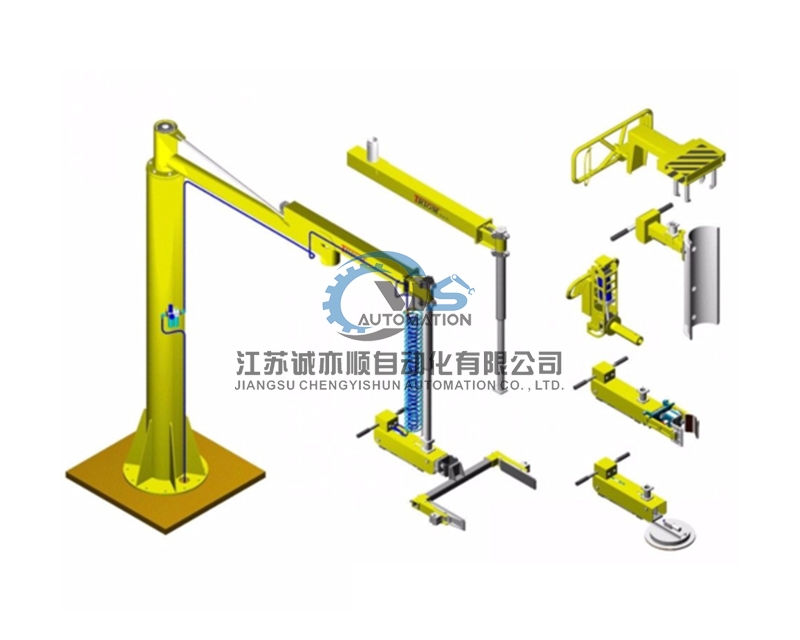
随着科技的不断发展,机械手在工业自动化领域中的地位也越来越重要。它可以执行各种复杂和繁重的任务,提高生产效率和质量。机械手的安装是机器人应用中非常重要的一步,关系到机械手的工作性能和使用寿命。本文将介绍助力机械手的安装步骤及设计要点。
一、安装前准备
1.了解工作场所,包括工件的大小和形状、工序要求、环境温度和湿度等。
2.熟悉机械手的各个部分和功能。在安装前请认真阅读机械手说明书和相关文件,了解机械手的技术规格和参数。
3.准备安装所需的工具和材料,如扳手、钳子、螺丝等。
二、机械手安装步骤
1.安装机械臂:机械臂是机械手的核心部分,是实现运动控制和操作的关键。在安装机械臂前,需要根据工作场所的要求选择合适的机械臂型号。一般机械臂需要通过螺栓安装在机械手基座上,注意螺栓的规格、长度和夹紧力度。
2.安装关节:机械臂需要依靠关节进行运动,安装关节需要确保关节部件的匹配和准确对接,能够满足机械手的运动参数要求。
3.安装执行器和配合器:执行器主要是机械手的驱动部分,通过电机或气动马达等力量传递装置驱动。配合器是负责传递力矩和扭矩的机械部件,能够抵御扭矩和力矩的冲击和振动。
4.安装末端执行器(夹爪):末端执行器是机械手的“手指”,负责抓握、夹持、开关等动作。在安装末端执行器前,需要根据工作场所的需要,选择合适的配件和安全保护装置。
5.控制系统的安装:机械手的控制系统是实现机械手动作控制的重要组成部分。控制系统主要包括运动控制板、人机界面、传感器、通讯模块和数据采集模块等。
6.电气连接和调试:机械手的电气连接和设置是保障机械手正常工作和耐久性的重要环节,其中包括电路板的连线和程序控制的设置等。
三、设计要点
1.结构设计:机械手的结构设计应该考虑工作环境、工艺要求、工作负载和动作范围等因素。同时结构设计应该保障机械手的刚性、稳定性、精度和可靠性。
2.控制系统:机械手的控制系统是整个机械手运动控制的核心。控制系统设计应该考虑实际应用情况,选择合适的控制算法和编程语言,实现机械手的高速运动、精准定位和姿态控制。
3.传感器:机械手的传感器是负责传递机器人外部信息和内部信息的元件。可以通过传感器实现机械手对环境的感知和自适应控制,提高机械手的智能化和自动化。
4.安全保护:机械手的工作环境往往存在一定的安全风险,需要通过安全保护装置和预防措施进行控制。安全保护装置可以包括光栅、开关、急停按钮等。
总之,机械手的安装是机器人应用中非常重要的一步,关系到机械手的工作性能和使用寿命。设计要点和安装步骤中需要考虑的因素非常多,需要根据具体情况进行合理的选择和设计。希望该文给大家提供一些帮助,在机械手应用中能取得更好的效果。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号