联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号
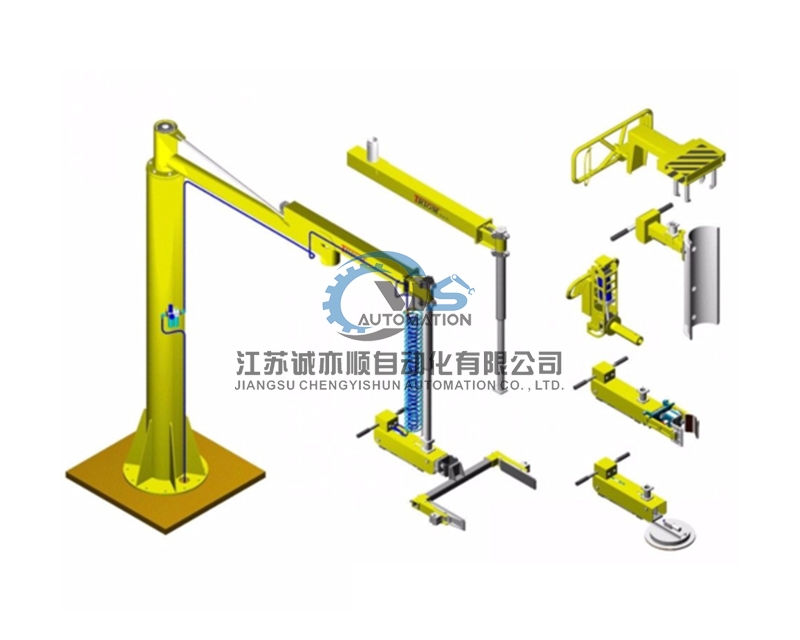
助力机械手系统的机械结构主要包括跟随系统机械结构和升降系统机械结构。跟随系统的机械结构主要包括跟随小车,角度传感器,支撑架和保护部分。升降系统的机械结构主要包括升降驱动装置和升降传感器。
助力机械手跟随系统的跟随小车安装于支撑架之上,Y向和Z向的驱动装置安装在跟随小车的下接触面和上接触面。X向驱动装置安装于随动机构的Y方向导轨的一端。角度传感器安装于跟随小车的下接触面,升降传感器的一端与物料连接,另—端与钢丝绳连接。
助力机械手升降系统速度控制实验的目的,就是实现助力机械手的平稳和可靠运行,其输入信号由升降传感器进行采集。在物料进行上升或下降运动时,升降传感器上的电位计的电压值将产生增大或减小的变化。电位计采集的电压值波动较大,需对输入的电压信号进行滤波处理。滤波器采用巴特沃兹三阶滤波器。
助力机械手输入信号经过滤波器处理得到的曲线较为光滑,能够适用于升降系统的速度实验中。升降传感器采集的电压值,经过滤波,转换为升降系统速度输入信号。助力机械手升降系统速度控制的反馈信号是由经过电机上的编码器采集得到的。
助力机械手操作者将竖直方向上的运动趋势作用于升降传感器。升降传感器中的滑动式电位计将运动信号以电压v的形式通过上位机的接口板传送给半物理平台。上位机对接收到的电压信号通过滤波器进行滤波处理,而后经过计算得到输入速度。速度控制器将速度控制信号通过串口,以PWM信号的形式发给下位机。下位机将驱动电压发给驱动电机。电机运动时,与其同轴的编码器将运动时的速度以脉冲数的形式反映给上位机。上位机通过数据接口板接收到的信号,经滤波和计算得到反馈速度信号。
助力机械手升降系统的运动趋势由操作者给予,存在一定的随机性。可看出:与未经过滤波的跟随系统的反馈速度信号相比,经过滤波后的升降系统反馈速度信号波动性小,较为平滑;当操作者在对物料进行启动与停止操作时,助力机械手升降系统能够平缓稳定实现操作者的操作意图;由于驱动电压不足、信号经滤波处理等情况,反馈速度与输入速度存在一定的误差,但不影响物料升降运动的实现。助力机械手由升降系统速度控制实验结果得出:通过控制器的控制,助力机械手升降系统能够实现操作者对于物料的升降运动。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号