

联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号
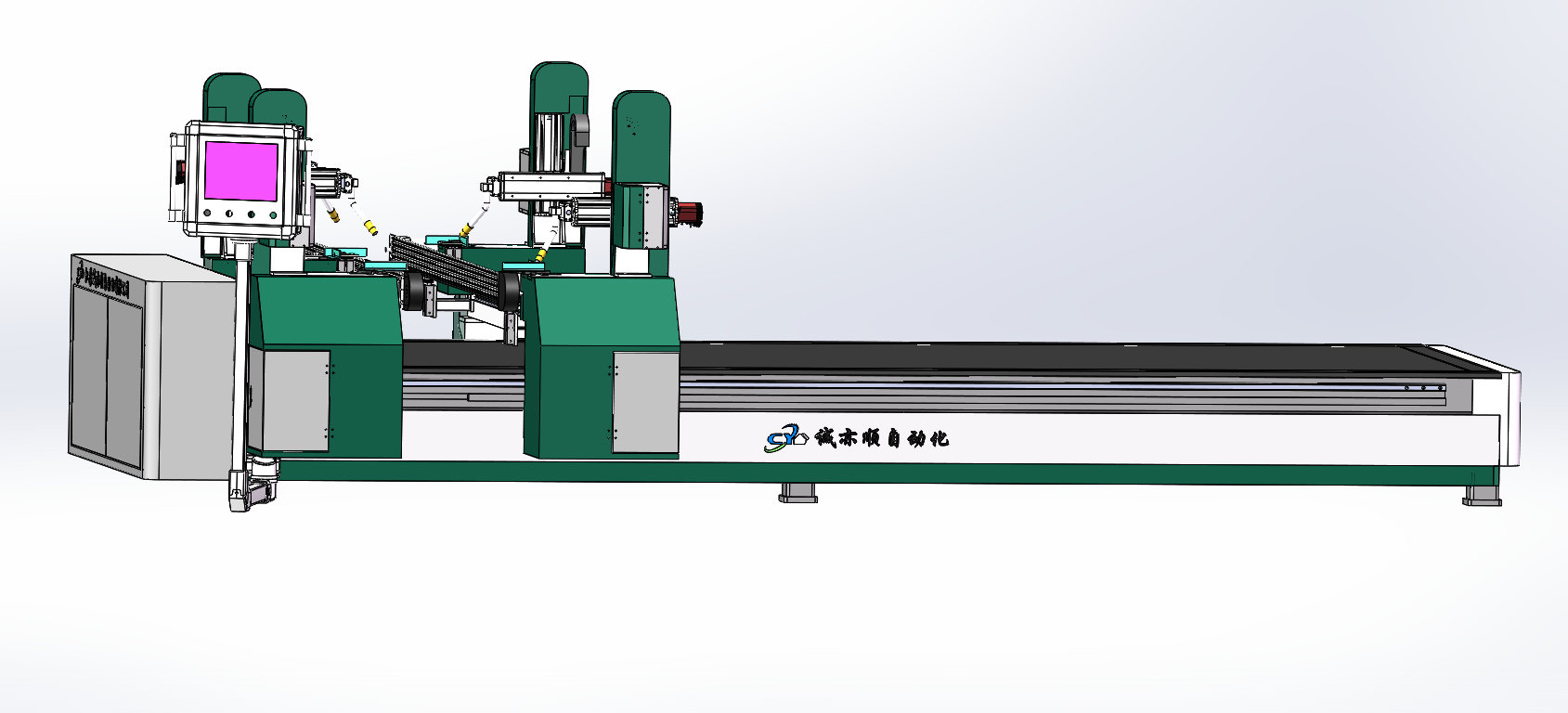
助力机械手是在自动化生产过程中使用的一种具有提取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。平衡器助力机械手原理近年来,随着电子技术特别是计算机的广泛应用,机器人的研制和生产已成为方法领域内迅速发展起来的一门新兴方法,平衡器助力机械手原理它更加促进了机械制造业自动化设备的发展,使其能更好地实现与机械化和自动化的有机结合,代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高劳动生产力。
平衡器助力机械手原理控制气路图设计。反馈控制气路含有气源处理、负载选择、信号反馈处理3个模块。气源处理包括从厂吲气,过滤器过滤处理和调压器调制压力,将清洁、干燥、稳定的压缩空气输入到空负载选择模块和标准气缸。负载选择模块包括空载气控平衡阀、负载气控平衡阀、负载切换开关、平衡器助力机械手原理气控方向阀和或门组成,将机械手是否带负载的信号输入给信反馈处理模块。信号反馈处理模块包括标准气缸、或门、气控阀组成,将标准气缸的反w=12/s馈压力信号与空负载信号的逻辑或i]信号输入给主气控阀,使标准气缸的输入励与输出达到平衡。

智能助力机械手是一种气动操控的气动助力手动机械手。用户气动操控机械臂完成机械手的上下运动和旋转运动,并通过操控气动控制开关夹紧夹具,平衡器助力机械手原理从而进行工件运输、载荷转移、装配等操控。智能助力机械手操控简单灵活,平衡器助力机械手原理适用于现代装配行业、加工、汽车装配等行业。使用智能助力机械手可以降低操控人员的劳动强度,在运输大质量I件时实现轻操控和定位,保证设备和操控人员的安好。

平衡器助力机械手原理一、安全阀单元。监控机械臂的运动速度、防止在错误指令发出或意外发生后机械臂快速上升或下降伤人。二、断气保护。确保机械手断气不会发生意外伤人,操作可持续1到2个工作循环。三、平衡器助力机械手原理制动器单元。制动器位于连接关节处,以防止机械手旋转和松脱,也可使得操作者容易控制工件、即机械手和夹具可停在任意位置;制动器由装在夹具上的按钮控制,当操作者按下控制按钮后,机械手处于锁紧状态;制动器也可于工作结束后停放机械手;处于制动状态时,机械手所有按钮不起作用,防止外伤害发生。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号



