

联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号

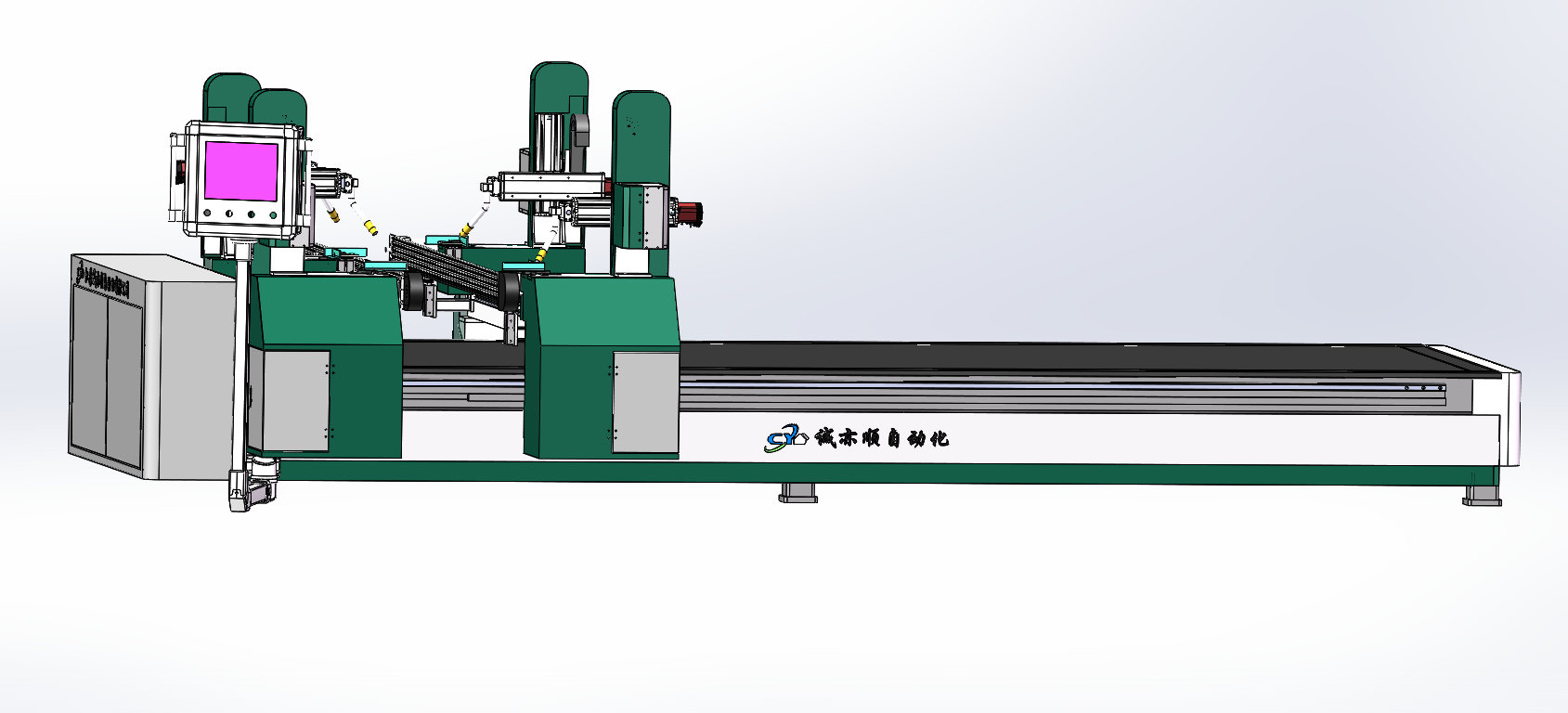
助力机械手原理工作时,操作人员将机械手拉到工作地点,将手柄下压,以具上的定位装置作为定位基准,对工件开展夹紧,这时将负载压力切换成高压,提起工件后,依据需要将工件开展翻转等动作。助力机械手原理当工件装配完毕后,再将负载压力切换成低压。机械手在高低压状态时可在任意位置保持平衡。在正常情况下,机械手不会自行滑动或转动,当机械手带载或脱载运行时均可按下制动开关,将机械手停在空间任意位置。

总装线辅助机器人设计要求操作简单,投入成本低,车型兼容性好,有利于持续改进动的开展。目前,前挡风玻璃装配由于工艺设计需要,助力机械手原理通过操作工使用人工手拿吸盘配合装配,用手吸盘吸紧力不足,前挡风玻璃是大的材料,右侧的员工需要踏台到车身左侧去与另一名员工配合取料装配,行走过程存在步行时间浪费与安全隐患。助力机械手原理现场这种装配方式的劳动强度大,不利于现场装配效率的提高。通过我司研究参照各知名企业的助力机械手进行设计,提升了员工的装配效率,降低了员工的劳动强度,提高了现场装配工艺装备需要,符合汽车装配工艺装备使用要求。

气动助力机械手主体结构分三个主回转关节,可分别绕自身轴线作360度自由回转,中每个关节上均装有制动装置,,可依据实际需要在任意位置制动。助力机械手原理大臂部分为四连杆结构由气缸驱动实现机械手上下运动,结合三个主关节的回转实现工件的灵活进行搬运或装配。夹具结构可依据工件的不同采用不同的非标设计,助力机械手原理为发动机缸体生产加工行业对缸体上加工中心用进行搬运助力机械手,于需要工件上加工中心前后对态在机械手上开展调整,需要对工件开展平面回转,360度翻转及夹紧等动作,在夹具非标设计上较为复杂,并在设计细节及精度上提出很高要求。
助力机械手原理具体控制流程为:厂房空气经过气源处理模块处理后,分成1组动力气路和3组信号气路。动动气路依次通过单向阀、气控减压阀动力端口后,向标准气缸提供动力气源;一组信号气路依次通过手动液压换向阀和气控液压换向阀,助力机械手原理对来自负载气控平衡阀的负载信号进行通断选择控制;二组信号气路依次通过负载气控平衡阀和气控液压换向阀,为汽动液压换向阀提供负载信号;第三组信号气路依次通过控制气控平衡阀和或门,与来自气控液压换向阀的信号进行逻辑或处理。3组信号经换向选择和逻辑或处理后,为下一个或提供空载或负载信号,与来自标准气缸端的反馈气压信号进行逻辑或处理,将逻辑或信号输入给主气控平衡阀,使主气控平衡阀的输出动与标准气缸励相等,使机械手达到平衡。

助力机械手原理在实际的自动化流水线生产中,驱动机器人的电机,常常被供以低水平的速率控制环路,这种环路需要预先设定的角速度作为参考输入,并且稳定电机的角速度到这个值上。如果这个调节环路非常有效,那么自动化流水线设备设定速率值和实际速率之间的差将会很小,助力机械手原理即使是在设定速率值和电机的负载连续变化的时候(至少在一定范围内)。也可以相反过来让我们把设定速率看做一个自由控制变量,很多工业上应用的机械手臂的配套控制器都是基于这一原理。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号



