

联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号

助力机械手角度传感器主要的组成:角度传感器外壳、旋转编码器、转动臂、摇臂和钢丝绳导向装置。当助力机械手钢丝绳的沿绳方向和竖直方向产生角度时,悬挂式助力机械手厂家吊丝导向装置将偏角传递给摇臂,摇臂带动与旋转编码器同轴安装在壳体上的转动臂。旋转编码器将测量的角度值信号传送给上位机,悬挂式助力机械手厂家上位机通过具体的控制算法,发送相应的驱动信号给下位机,下位机将驱动电压输送给助力机械手跟随系统的驱动装置,从而实现跟随小车随操作者对物料的活动而活动。
悬挂式助力机械手厂家汽车前档风琉璃安装气动助力机械手整个系统由性能高单片机、功率放大模块、通信模块、滤波电路模块等组成。中,性能高单片机主要负责控制算法的计算,功率放大模块实现PWM信号的放大及电机的过流保护,悬挂式助力机械手厂家滤波放大电路模块实现对末端操作器和压力传感器信号的处理,通信模块负责与上位机进行通信。特别提醒气源应该清洁、去除水分和湿气。警惕压缩空气的清洁问题导致设备常见故障,尤其是新建立的工厂或新建立的压缩空气供应站点,于系统或管道处于启或刚启用的状态,会使压缩空气中存在较多的杂质,所以应提供多级清洁过虑,并保持一定时间的空放状态以便杂质清除。

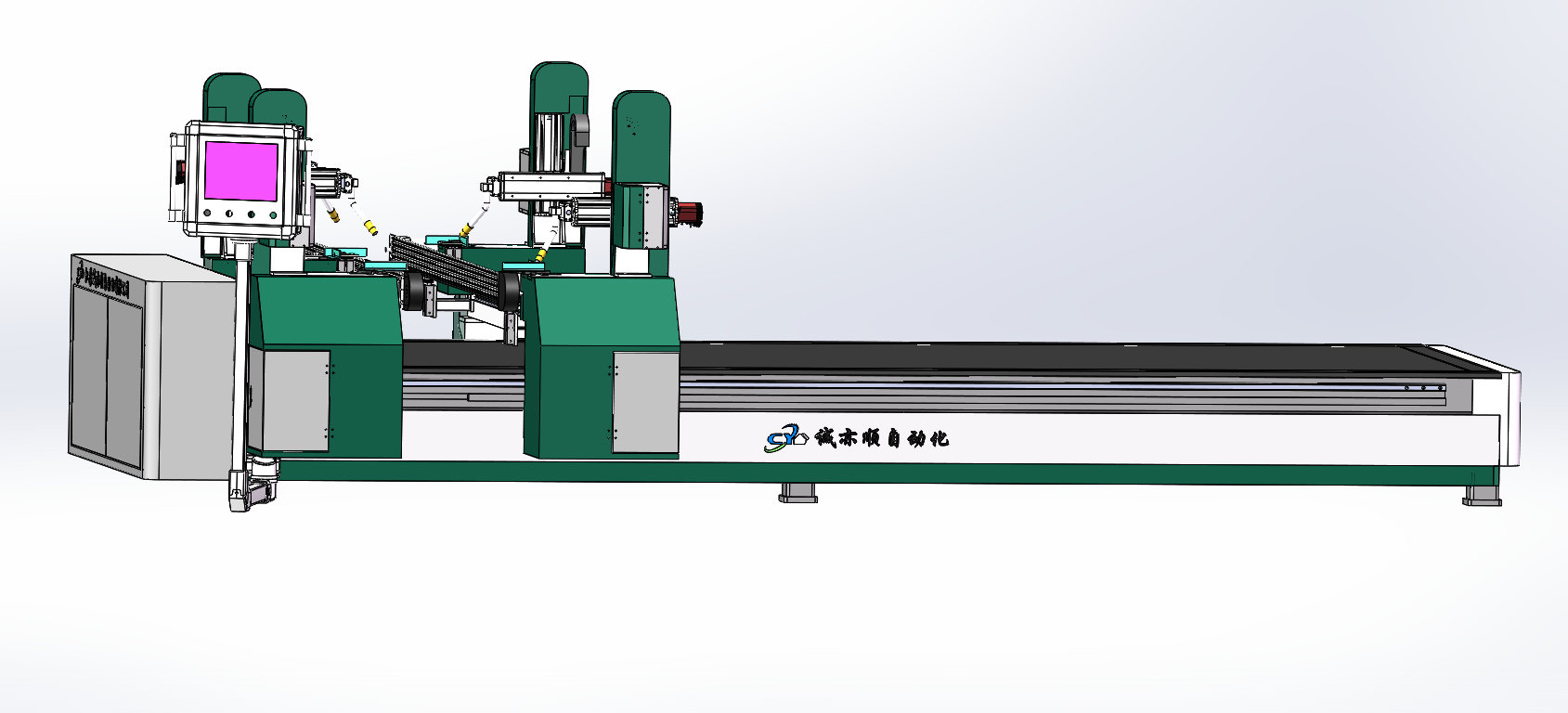
角钢法兰自动焊主要配置:1.悬挂式助力机械手厂家全系安科特伺服电机。2.导轨采用台湾上银导轨。3.齿条是研磨7级,正负差为2丝。4.系统采用德国mimis系统,程序操作直观简单不需要任何编程。角钢法兰自动焊主要参数:1.加工行程1500*1500-4000*1500。2.悬挂式助力机械手厂家加工角钢范围3#4#5#(国标非标镀锌.碳钢.不锈钢),3.焊枪手动微调50mm。4.焊枪行走速度0-50mm/s。5.控制电源220V。6.机身长度5000*2000*1300。

助力机械手的平衡力各参数根据Excel计算得出后,需要进一步确定气缸运动到每个位置的平衡力大小,并找出极大、极小值。由此可以判断出气缸运动流程力输出的平稳性,悬挂式助力机械手厂家进而验证结构设计的合理性。我们在Excel.上编制了VBA语句,单击计算后,开始运算并采集数据,悬挂式助力机械手厂家得出助力机械手每个位置对应的平衡力大小。助力机械手平衡力数据进而关系到图表选项中,自动生成平衡力与平衡位置的关系图,非常直观的看到,较大平衡力发生在起始位置,最小平衡力大致位于运动的2/3阶段,助力机械手平衡力范围为区间明显。虽然助力机械手平衡力总体成曲线分布,但误差不大,平衡力输出相对稳定,验证了该结构可实现平衡要求。助力机械手平衡条件为:平衡力F=小臂自重+气缸自重+操控部分重量。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号



