

联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号

1,助力搬运机械手原理支持各种角铁类型。2、只需输入角铁下料尺寸即可,无需示教,无需编程使用更方便。3,焊接范围240*240到1500*3500根据角铁参数自动定位。4、助力搬运机械手原理控制系统经过严格多项可靠性测试,如EFT(电快速瞬变/脉冲群)、EMC(电磁兼容性)、ESD(静电放电测试)、高低温震动、跌落等。
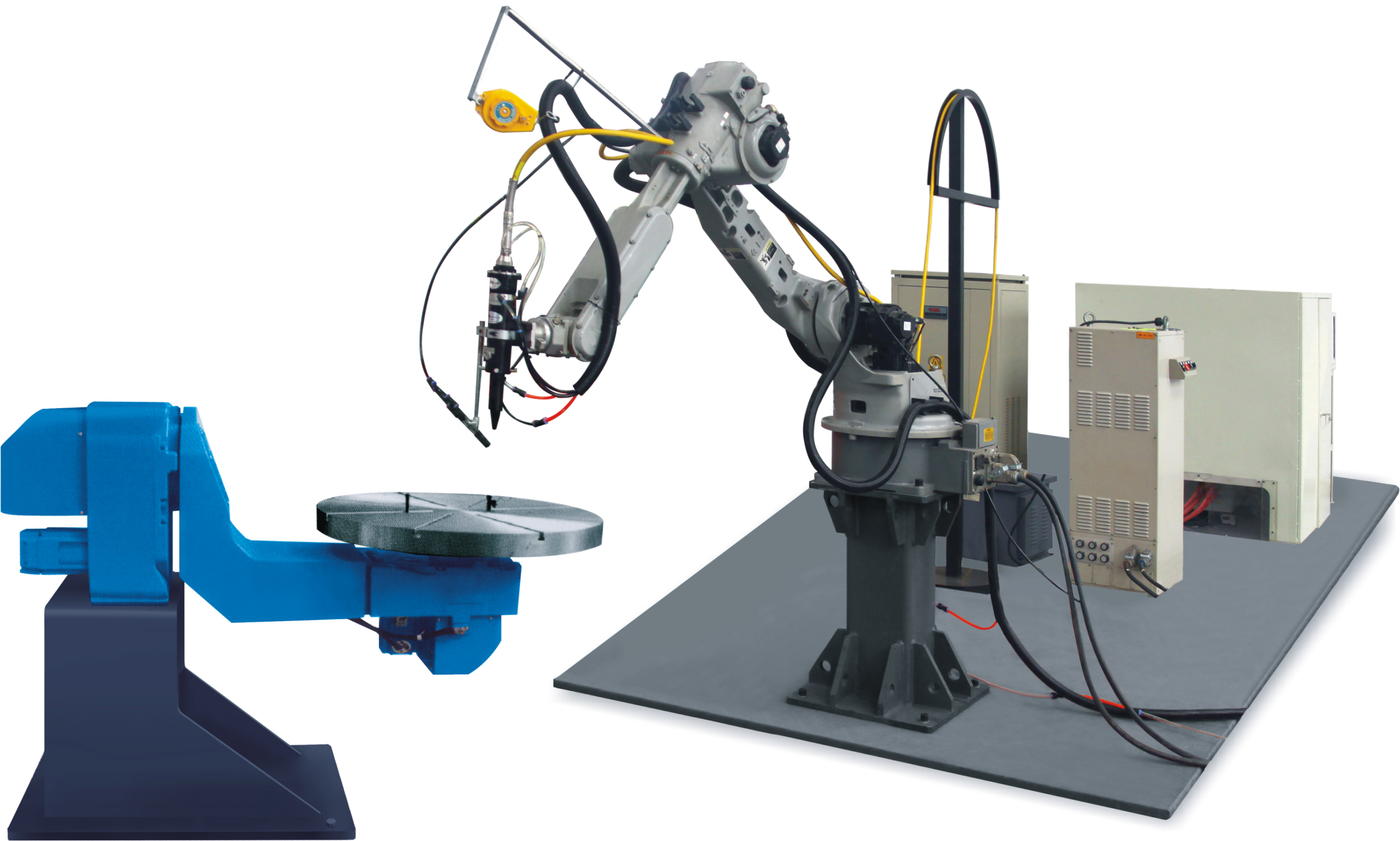
助力搬运机械手原理工作时,操作人员将机械手拉到工作地点,将手柄下压,以具上的定位装置作为定位基准,对工件开展夹紧,这时将负载压力切换成高压,提起工件后,依据需要将工件开展翻转等动作。助力搬运机械手原理当工件装配完毕后,再将负载压力切换成低压。机械手在高低压状态时可在任意位置保持平衡。在正常情况下,机械手不会自行滑动或转动,当机械手带载或脱载运行时均可按下制动开关,将机械手停在空间任意位置。

助力搬运机械手原理提升系统可根据带有反向自锁功能性的蜗轮杆减速器及滚筒两种部件,实现重物的调节功能性。当操控人员提升重物时,机械手可以辅助人工施加较小的操控力,并随着操控力的变化,重物的调节位置和速度也会随着增大或减小。同时,助力搬运机械手原理它的提升系统的手柄上还安装了力传感器,可以自动测量提升操控力,使机械手更加灵便、敏捷,完全符合生产工人的需求。助力机械手的负载重量确定后,将主体结构设计了三种规格,来满足不同的承重要求。可以自动处理数据,挑出较大值、最小值、平均值等,并将各数值描绘为曲线,将极值标在曲线上,非常方便和直观。

在自动化流水线自动控制概念中,通过模拟机械手臂的运动控制,更倾向于采用速率控制输入的模型,而不是力矩控制输入的模型。这一选择的关键缘故以下:助力搬运机械手原理运动学模型比动力学模型更简单。特别的,不需要引入大量的矩阵制的方程,这些方程的确定要依赖于大量的关于结构质量等参数,助力搬运机械手原理对于许多自动化流水线应用来说,我们没有必要正确知道所有这些量的具体数值。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号



