

联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号

1)智能助力机械手原理悬挂式安装:此种安装方式的安装底座可以选择I字钢立柱,节省空间。中,悬挂式移动安装是将悬挂式气动平衡机械手安装于空中轨道滑轮车,可以扩展气动平衡机械手的工作空间,便于进行远距离的进行搬运任务。2)智能助力机械手原理立式安装:这种安装方式选择的安装位置比较灵活,但是存在占用一定空间的问题。

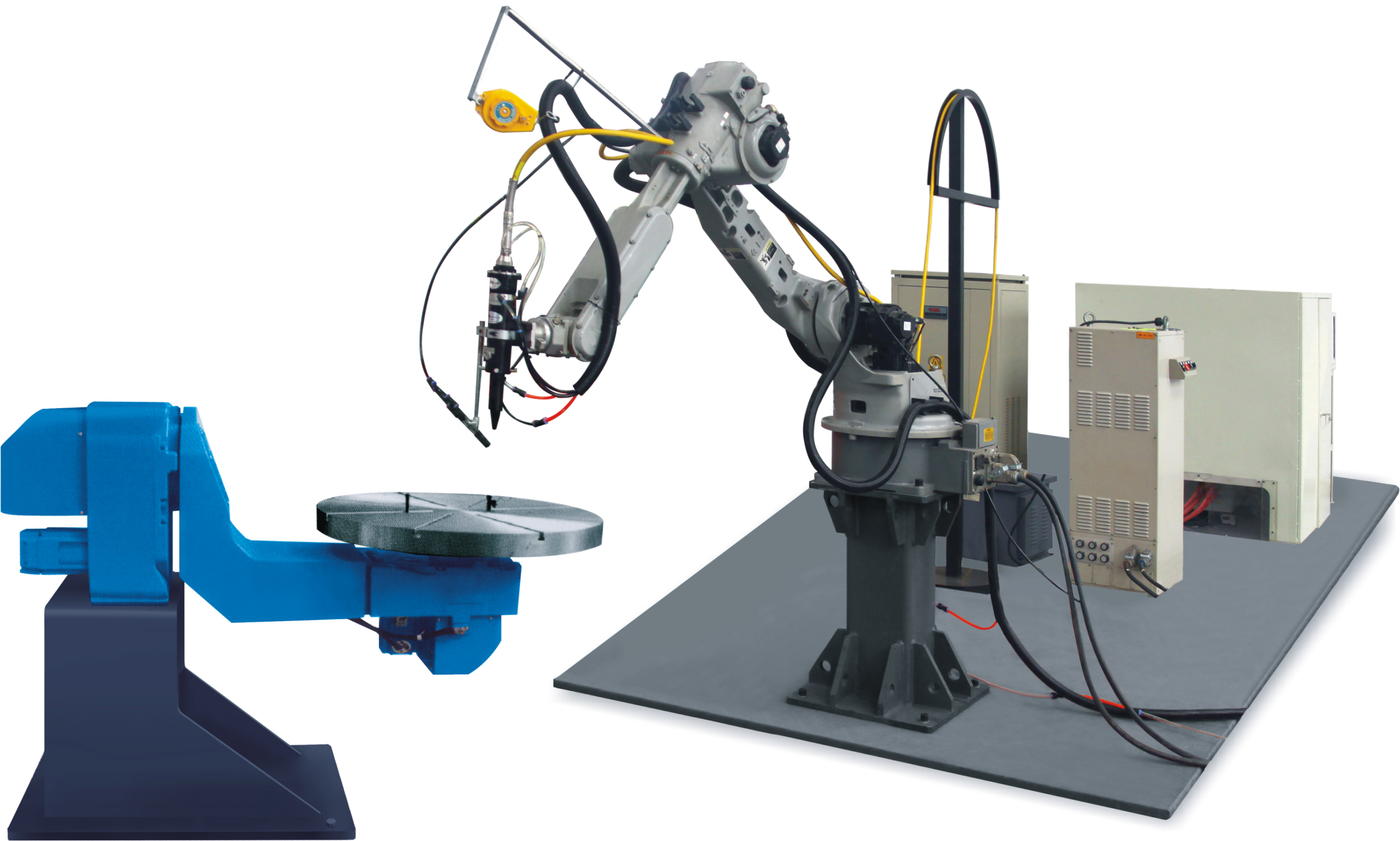
智能助力机械手原理基本原理是使用负载检测及气板馈对吊运的工件实现自动平衡,以便使工件”悬浮”于空中。这样在一定的空间内,操作者只需对工件应用较小的推力或拉力,就可以破坏气压平衡,使工件轻松、效的实现自由搬运。机械手随位平衡系统由臂1、臂2、臂3、转轴、控制系统及其控制的标准气缸活塞杆组成;控制策略。智能助力机械手原理调节和控制主气控阀的输出励,使负载端与标准气缸端的力矩相等,从而使标准气缸能主动、实时地平衡机械手负载端力臂的变化,实现机械手随位平衡;

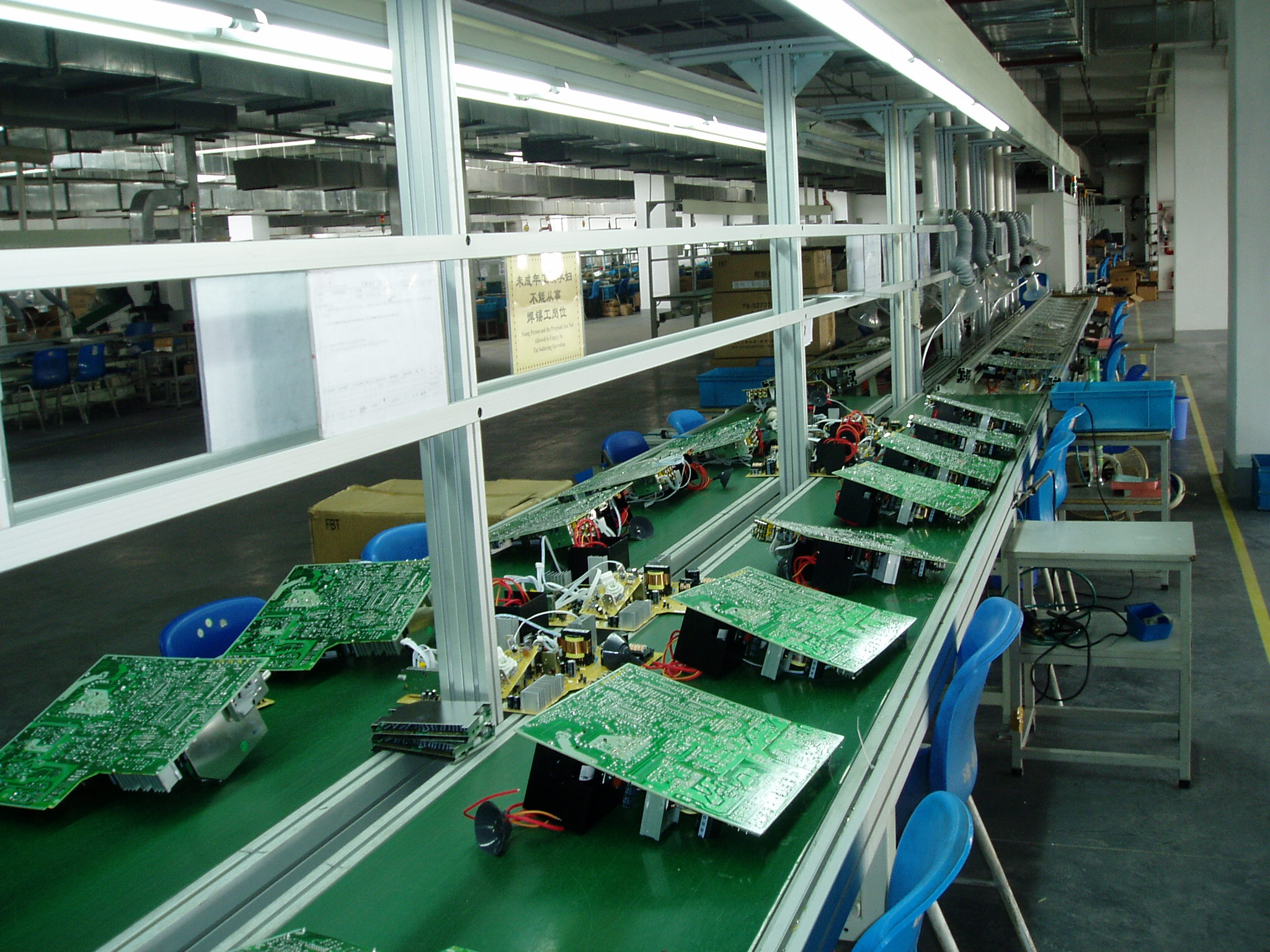
1.智能助力机械手原理机床加工工件的装卸,特别是在自动化机床,组合机床上使用较为普遍。2.在装配作业中应用广泛,在电子行业中它可以用来装配印制电路板,在机械制造业中它可以用来组装零部件。3.可在劳动条件差,单调重复易疲劳的工作环境工作,以代替认的劳动。4.智能助力机械手原理可在危险场合下工作,如军工品的装卸、危险品及有害物的搬运等。5.宇宙及海洋的开发。6.军事工程及生物医学方面的研究和实验。
智能助力机械手原理控制气路图设计。反馈控制气路含有气源处理、负载选择、信号反馈处理3个模块。气源处理包括从厂吲气,过滤器过滤处理和调压器调制压力,将清洁、干燥、稳定的压缩空气输入到空负载选择模块和标准气缸。负载选择模块包括空载气控平衡阀、负载气控平衡阀、负载切换开关、智能助力机械手原理气控方向阀和或门组成,将机械手是否带负载的信号输入给信反馈处理模块。信号反馈处理模块包括标准气缸、或门、气控阀组成,将标准气缸的反w=12/s馈压力信号与空负载信号的逻辑或i]信号输入给主气控阀,使标准气缸的输入励与输出达到平衡。

智能助力机械手原理具体控制流程为:厂房空气经过气源处理模块处理后,分成1组动力气路和3组信号气路。动动气路依次通过单向阀、气控减压阀动力端口后,向标准气缸提供动力气源;一组信号气路依次通过手动液压换向阀和气控液压换向阀,智能助力机械手原理对来自负载气控平衡阀的负载信号进行通断选择控制;二组信号气路依次通过负载气控平衡阀和气控液压换向阀,为汽动液压换向阀提供负载信号;第三组信号气路依次通过控制气控平衡阀和或门,与来自气控液压换向阀的信号进行逻辑或处理。3组信号经换向选择和逻辑或处理后,为下一个或提供空载或负载信号,与来自标准气缸端的反馈气压信号进行逻辑或处理,将逻辑或信号输入给主气控平衡阀,使主气控平衡阀的输出动与标准气缸励相等,使机械手达到平衡。
智能助力机械手原理化工行业是主要应用领域之一。很多现代化工业品生产要求精密化、微型化、高纯度、质和高可靠性,在产品的生产中要求清洁环境,清洁度的高低直接影响产品的合格率,清洁技术是根据产品的要求而定的照产品生产对洁净胜产环境的污染物的控制要求、控制方法以及控制设施的日益严格而不断发展。智能助力机械手原理因此,在化工领域,随着未来更多的化工生产场合对于环境清洁渡的要求越来越高,该产品将会得到进一步的利用,因此其具有广阔的市场空间。外,在玻璃行业,无论是空心玻璃、平面玻璃、管状玻璃,还是玻璃纤维一现代化、含矿物的高科技材料是电子和通讯、化学、医药和化妆品I业中非常重要的组成部分。且如今它对于建筑I业和其他工业分支来说也是不可或缺的。特别是对于洁净度要求非常高的玻璃,该产品是较好的选择。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号



