

联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号

气动助力机械手主体结构分三个主回转关节,可分别绕自身轴线作360度自由回转,中每个关节上均装有制动装置,,可依据实际需要在任意位置制动。智能助力机械手原理大臂部分为四连杆结构由气缸驱动实现机械手上下运动,结合三个主关节的回转实现工件的灵活进行搬运或装配。夹具结构可依据工件的不同采用不同的非标设计,智能助力机械手原理为发动机缸体生产加工行业对缸体上加工中心用进行搬运助力机械手,于需要工件上加工中心前后对态在机械手上开展调整,需要对工件开展平面回转,360度翻转及夹紧等动作,在夹具非标设计上较为复杂,并在设计细节及精度上提出很高要求。

智能助力机械手原理负载自锁单----负载到位保护。负载自锁到位保护设计,确保在工件没有放到指定位置时,夹具不会松开,即使按"松开”按钮;此设计可以阻止工件的非人为释放出来。负载自锁单元----负载悬空保护。负载自锁悬空保护设计,智能助力机械手原理确保工件处于半空中,不释放出来,即使按"松开”按钮。如果操作者停止按"松开”按钮,机械手和夹具就会回到原始平衡状态;如果操作者继续按“松开”按钮,工件会继续处于被抓紧状态,并慢慢地随机械臂下降到设计较低点。负载自锁单元---负载极限保护。负载自锁极限保护设计,在机械手设计较低极限位置时,夹具不会松开负载,即使按"松开”按钮。总之,在任何情况下,只贿工件被放置在稳定接触面上时,才会被释放出来。

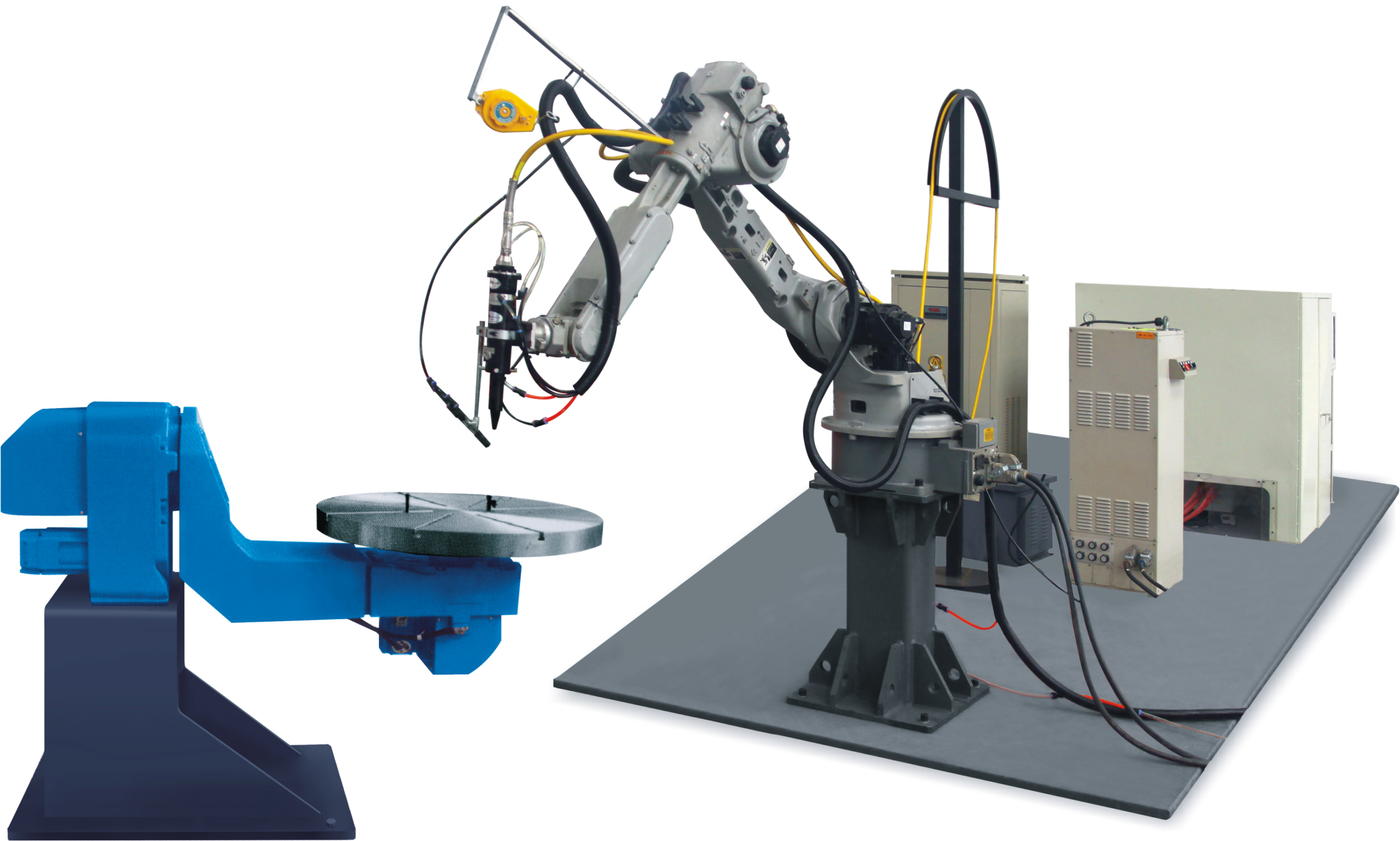
角铁法兰自动焊是一台速度快、精准度高、省人工、焊接漂亮等许多优点的设备,大大提高了焊接水平,智能助力机械手原理全自动化焊接是焊接领域的一大进步,这也意味着未来许多方面也越来越自动化,智能助力机械手原理所以我们不断改进不断研发,为了客户更加满意。

一、气动助力机械手指示灯变换正常,压励机不能作业解决方法:输出接点间的妥当管熔断,替换同标准妥当管,W型,S型控制器在面板上,N型,Z型控制器在线路板上,标准控制器内继电器触点老化,智能助力机械手原理替换两个同类型的继电器。二、气动助力机械手不作业,一切指示灯均不亮解决方法电源妥当管断路:替换同标准妥当管,W型,S型控制器在面板上,智能助力机械手原理标准:5*20/0.5A:N型,Z型控制器在线路板上,毛病扫除后主动康复。
智能助力机械手原理于助力机械手具有省事,幼的特点,被广泛应用于现代工业中的各个行业领域,如:大型物料的移载,搬运,大型设备的定位、装配等场合,总之,在现代生产中,无论原料的接受还是半成品的加工、产、配送等环节,气动机械手都发挥着不可替代的作用。助力机械手设备当处于最短的等效力臂的情况平衡使用性能调节校正阶段的平衡信号气体压力,智能助力机械手原理为助力机械手负载端臂在全部区域内部可以完成平衡的最小气体压力,负载端臂在其他区域的反馈气体压力通常均大于该基准的信号气体压力。
智能助力机械手原理汽车前档风琉璃安装气动助力机械手整个系统由性能高单片机、功率放大模块、通信模块、滤波电路模块等组成。中,性能高单片机主要负责控制算法的计算,功率放大模块实现PWM信号的放大及电机的过流保护,智能助力机械手原理滤波放大电路模块实现对末端操作器和压力传感器信号的处理,通信模块负责与上位机进行通信。特别提醒气源应该清洁、去除水分和湿气。警惕压缩空气的清洁问题导致设备常见故障,尤其是新建立的工厂或新建立的压缩空气供应站点,于系统或管道处于启或刚启用的状态,会使压缩空气中存在较多的杂质,所以应提供多级清洁过虑,并保持一定时间的空放状态以便杂质清除。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号



