

联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号

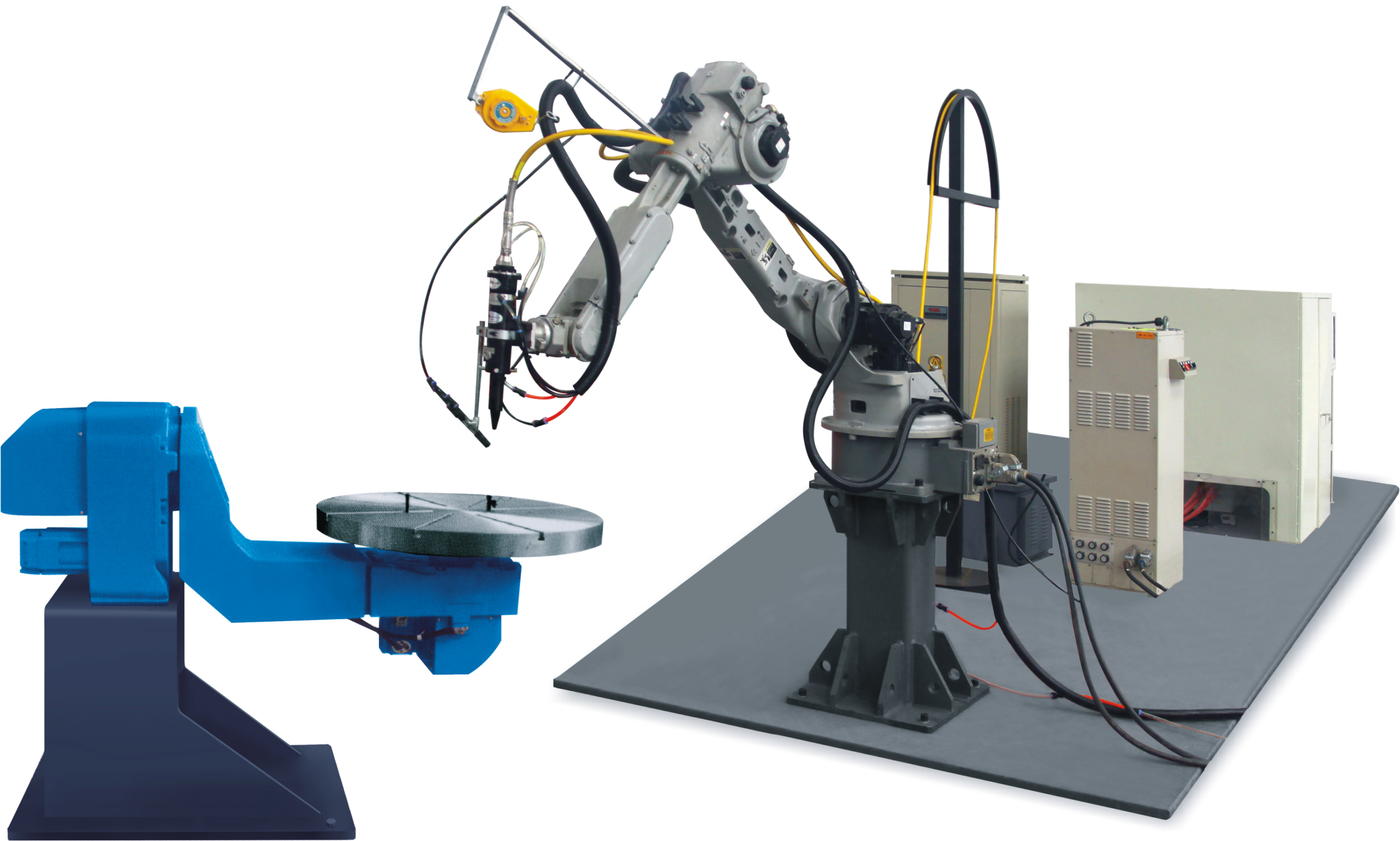
助力机械手厂家基本原理是使用负载检测及气板馈对吊运的工件实现自动平衡,以便使工件”悬浮”于空中。这样在一定的空间内,操作者只需对工件应用较小的推力或拉力,就可以破坏气压平衡,使工件轻松、效的实现自由搬运。机械手随位平衡系统由臂1、臂2、臂3、转轴、控制系统及其控制的标准气缸活塞杆组成;控制策略。助力机械手厂家调节和控制主气控阀的输出励,使负载端与标准气缸端的力矩相等,从而使标准气缸能主动、实时地平衡机械手负载端力臂的变化,实现机械手随位平衡;

助力机械手厂家在操作原理上,助力机械手要使平衡气缸,驱动一个杠杆结构,对机械臂的负载进行平衡。而气缸是可以被调整的,其作用为简单的升降运动,手动作用到夹具上。在此过程中,有两条独立的气体回路,可以给气缸进行通风。条气动系统的作用是对机械臂和操作夹具作出重量平衡,助力机械手厂家此平衡被称为零负载平衡。而第二条气动系统可以对机械臂、需要搬运的工件以及操作夹具作重量平衡,这一平衡被称为负载平衡,两条气动系统可以切换。
助力机械手厂家于助力机械手具有省事,幼的特点,被广泛应用于现代工业中的各个行业领域,如:大型物料的移载,搬运,大型设备的定位、装配等场合,总之,在现代生产中,无论原料的接受还是半成品的加工、产、配送等环节,气动机械手都发挥着不可替代的作用。助力机械手设备当处于最短的等效力臂的情况平衡使用性能调节校正阶段的平衡信号气体压力,助力机械手厂家为助力机械手负载端臂在全部区域内部可以完成平衡的最小气体压力,负载端臂在其他区域的反馈气体压力通常均大于该基准的信号气体压力。

助力机械手厂家寸较大的智能助力机械手通常位于两个负载端臂成180度角的区域,较短的智能助力机械手位于两个负载端臂收缩至0度的区域。助力机械手厂家在助力器操纵器装置稳定平衡性能的调整和校正过程中,无论空负载下稳定平衡性能的调整和校正还是负载下稳定平衡性能的调整和校正,助力器操纵器装置通常都应调整到较短智能助力机械手区域的条件。

液压上料机械手要完成整个上料过程,需完成夹紧工件、手臂升降、伸缩、回转,助力机械手厂家平移等一系列的动作,这些动作都应该在工作拍节规定的时间内完成,具体时间的分配取决于很多因素,助力机械手厂家根据各种因素反复考虑,对分配的方案进行比较,才能确定。

助力机械手的动力参数为三相五线制供电,电源为三相电源,380v,环境温度为-10-45摄氏度,环境相对湿度为≤95%,压缩空气0.3-0.6mpa。艺要求上,助力机械手厂家需搬运的工件名称为轮胎、驱动轮轴、后机罩、座椅、油箱、分动箱以及弯杆支座。助力机械手设置有安全误操作保护设备,只有工件被安全安装到位,或是完全被工作面支撑后,工件才会被卸载。机械手主关节可360度转动,次关节也可360度转动,助力机械手厂家关节可360度转动。同时助力机械手有着两条独立气体回路:可用于对机械臂以及夹具的重量平衡,第二条可对机械臂、夹郟以及需要搬运物体作出重量平衡。两条气动系统可以全自动识别和切换,保证工件在任意时间和位置上的零重力平衡。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号



