

联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号

助力机械手是在自动化生产过程中使用的一种具有提取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。吸盘助力机械手原理近年来,随着电子技术特别是计算机的广泛应用,机器人的研制和生产已成为方法领域内迅速发展起来的一门新兴方法,吸盘助力机械手原理它更加促进了机械制造业自动化设备的发展,使其能更好地实现与机械化和自动化的有机结合,代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高劳动生产力。
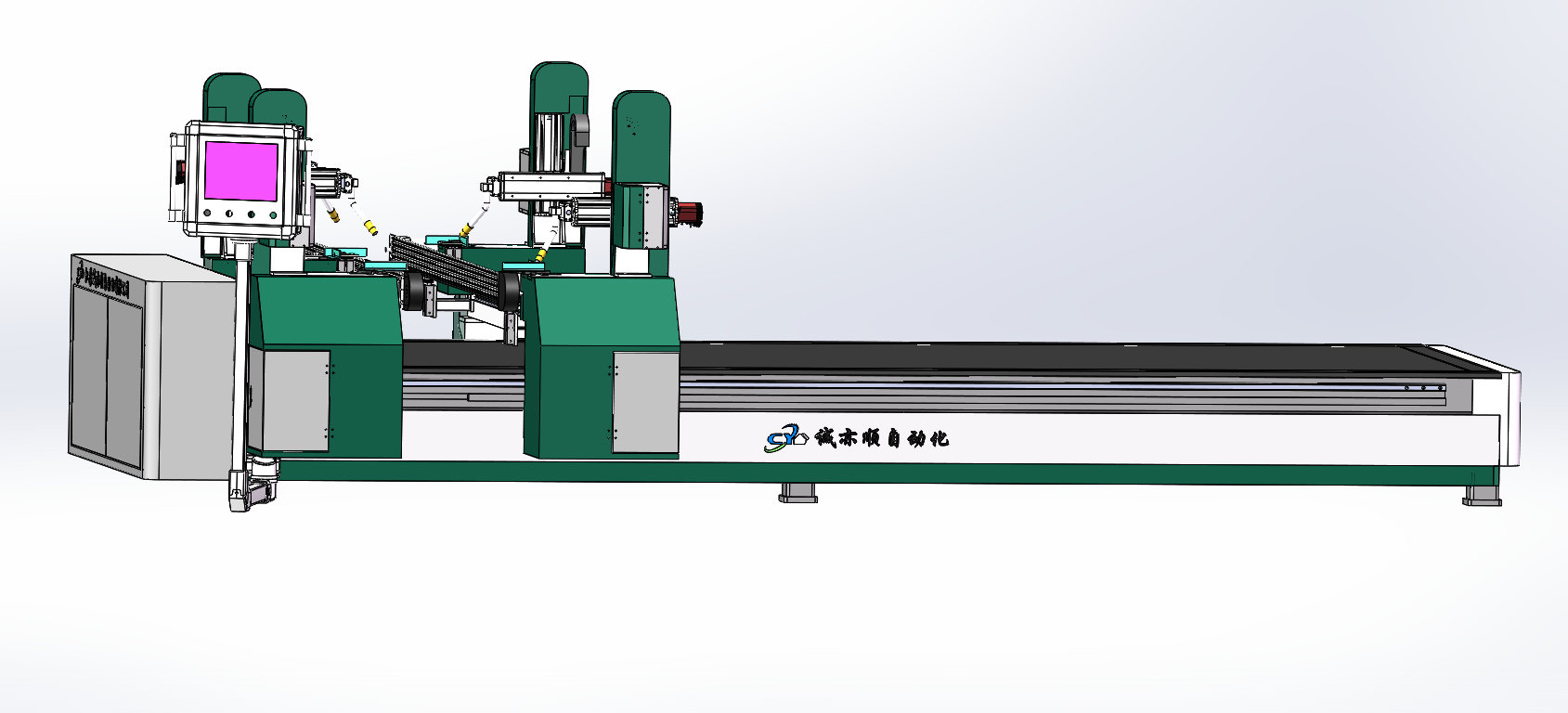
助力机械手的动力参数为三相五线制供电,电源为三相电源,380v,环境温度为-10-45摄氏度,环境相对湿度为≤95%,压缩空气0.3-0.6mpa。艺要求上,吸盘助力机械手原理需搬运的工件名称为轮胎、驱动轮轴、后机罩、座椅、油箱、分动箱以及弯杆支座。助力机械手设置有安全误操作保护设备,只有工件被安全安装到位,或是完全被工作面支撑后,工件才会被卸载。机械手主关节可360度转动,次关节也可360度转动,吸盘助力机械手原理关节可360度转动。同时助力机械手有着两条独立气体回路:可用于对机械臂以及夹具的重量平衡,第二条可对机械臂、夹郟以及需要搬运物体作出重量平衡。两条气动系统可以全自动识别和切换,保证工件在任意时间和位置上的零重力平衡。
当助力机械手搬运物资时,连接物料的钢丝绳会在沿绳方向与竖直方向上产生夹角。产生的夹角可反映出物料相对于跟随小车的活动趋势。吸盘助力机械手原理跟随系统角度测量装置,即角度传感器,就是为了测量助力机械手在操作者的操作下进行活动时,钢丝绳在沿绳方向与竖直方向上产生的夹角。吸盘助力机械手原理由于跟随系统有着X,Y两个方向上的活动,而两个方向上的活动互不干涉,这就要求摆角传感器能够实现同时测量两个方向上的角度。

吸盘助力机械手原理提升系统可根据带有反向自锁功能性的蜗轮杆减速器及滚筒两种部件,实现重物的调节功能性。当操控人员提升重物时,机械手可以辅助人工施加较小的操控力,并随着操控力的变化,重物的调节位置和速度也会随着增大或减小。同时,吸盘助力机械手原理它的提升系统的手柄上还安装了力传感器,可以自动测量提升操控力,使机械手更加灵便、敏捷,完全符合生产工人的需求。助力机械手的负载重量确定后,将主体结构设计了三种规格,来满足不同的承重要求。可以自动处理数据,挑出较大值、最小值、平均值等,并将各数值描绘为曲线,将极值标在曲线上,非常方便和直观。

一、吸盘助力机械手原理在装卸之前,-定要检查水和油是否进入电气控制箱。如果电器受潮,不要打开气动助力机械手,检查电源电压是否符合要求,前后安全门开关是否正常。二、确认电机的旋转方向一致后,接通辅助气动机器人的电源。三、吸盘助力机械手原理当气动助力机械手需要拆卸时,关闭气动助力机械手的电源,关闭气动助力机械手的气压源。四、排空空气压力。松开并拉动圆筒固定板的固定螺丝,移动手臂,移动缓冲座靠近手臂五、拧紧拔出气缸的固定板,防止气动助力机械手操纵器移动。锁定旋转安全螺钉,使气动助力机械手不能旋转等。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号



