

联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号
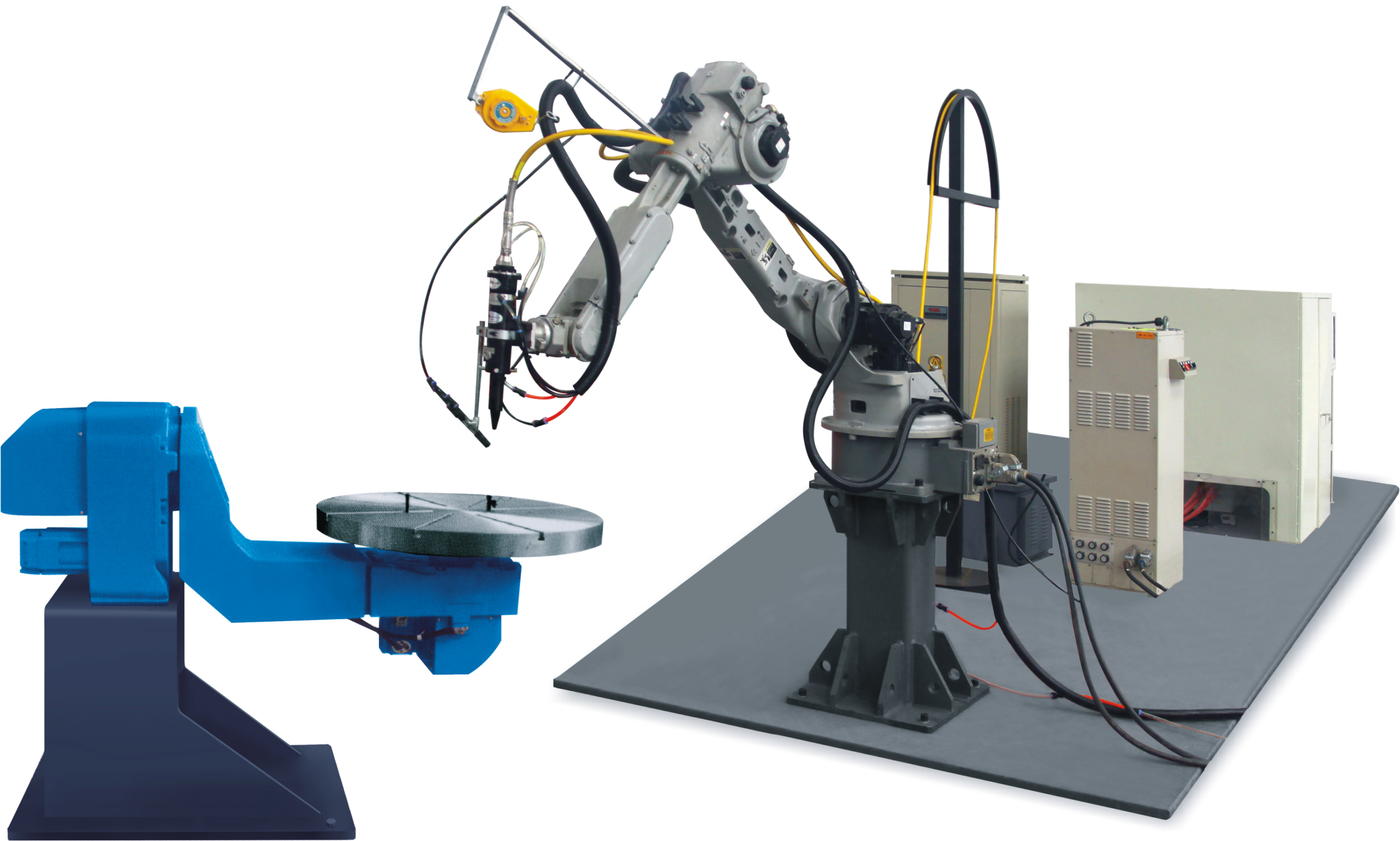
当助力机械手搬运物资时,连接物料的钢丝绳会在沿绳方向与竖直方向上产生夹角。产生的夹角可反映出物料相对于跟随小车的活动趋势。法兰自动焊原理跟随系统角度测量装置,即角度传感器,就是为了测量助力机械手在操作者的操作下进行活动时,钢丝绳在沿绳方向与竖直方向上产生的夹角。法兰自动焊原理由于跟随系统有着X,Y两个方向上的活动,而两个方向上的活动互不干涉,这就要求摆角传感器能够实现同时测量两个方向上的角度。

助力机械手,又称机械手、平衡吊、平衡助力器、手动移载机(以上说法并不专业但国内已经流行),是一种新颖的、用于物料进行搬运及安装时省力操作的助力设备。它巧妙地应用力的平衡原理,法兰自动焊原理使操作者对吊物进行相应的推拉,就可在空间内平衡移动定位。吊物在提升或下降时形成浮动状态,法兰自动焊原理靠气路保证零操作力(实际情况因为加工工艺及设计成本控制,操作力以小于3kg为判断标准)操作力受工件重量影响。无需熟练的点动操作,操作者用手推拉吊物,就可以把吊物正确地放到空间中的任何位置。

助力机械手角度传感器主要的组成:角度传感器外壳、旋转编码器、转动臂、摇臂和钢丝绳导向装置。当助力机械手钢丝绳的沿绳方向和竖直方向产生角度时,法兰自动焊原理吊丝导向装置将偏角传递给摇臂,摇臂带动与旋转编码器同轴安装在壳体上的转动臂。旋转编码器将测量的角度值信号传送给上位机,法兰自动焊原理上位机通过具体的控制算法,发送相应的驱动信号给下位机,下位机将驱动电压输送给助力机械手跟随系统的驱动装置,从而实现跟随小车随操作者对物料的活动而活动。

1.法兰自动焊原理机床加工工件的装卸,特别是在自动化机床,组合机床上使用较为普遍。2.在装配作业中应用广泛,在电子行业中它可以用来装配印制电路板,在机械制造业中它可以用来组装零部件。3.可在劳动条件差,单调重复易疲劳的工作环境工作,以代替认的劳动。4.法兰自动焊原理可在危险场合下工作,如军工品的装卸、危险品及有害物的搬运等。5.宇宙及海洋的开发。6.军事工程及生物医学方面的研究和实验。

一、法兰自动焊原理在装卸之前,-定要检查水和油是否进入电气控制箱。如果电器受潮,不要打开气动助力机械手,检查电源电压是否符合要求,前后安全门开关是否正常。二、确认电机的旋转方向一致后,接通辅助气动机器人的电源。三、法兰自动焊原理当气动助力机械手需要拆卸时,关闭气动助力机械手的电源,关闭气动助力机械手的气压源。四、排空空气压力。松开并拉动圆筒固定板的固定螺丝,移动手臂,移动缓冲座靠近手臂五、拧紧拔出气缸的固定板,防止气动助力机械手操纵器移动。锁定旋转安全螺钉,使气动助力机械手不能旋转等。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号



