

联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号
助力臂机械手厂家负载自锁单----负载到位保护。负载自锁到位保护设计,确保在工件没有放到指定位置时,夹具不会松开,即使按"松开”按钮;此设计可以阻止工件的非人为释放出来。负载自锁单元----负载悬空保护。负载自锁悬空保护设计,助力臂机械手厂家确保工件处于半空中,不释放出来,即使按"松开”按钮。如果操作者停止按"松开”按钮,机械手和夹具就会回到原始平衡状态;如果操作者继续按“松开”按钮,工件会继续处于被抓紧状态,并慢慢地随机械臂下降到设计较低点。负载自锁单元---负载极限保护。负载自锁极限保护设计,在机械手设计较低极限位置时,夹具不会松开负载,即使按"松开”按钮。总之,在任何情况下,只贿工件被放置在稳定接触面上时,才会被释放出来。
在自动化流水线自动控制概念中,通过模拟机械手臂的运动控制,更倾向于采用速率控制输入的模型,而不是力矩控制输入的模型。这一选择的关键缘故以下:助力臂机械手厂家运动学模型比动力学模型更简单。特别的,不需要引入大量的矩阵制的方程,这些方程的确定要依赖于大量的关于结构质量等参数,助力臂机械手厂家对于许多自动化流水线应用来说,我们没有必要正确知道所有这些量的具体数值。

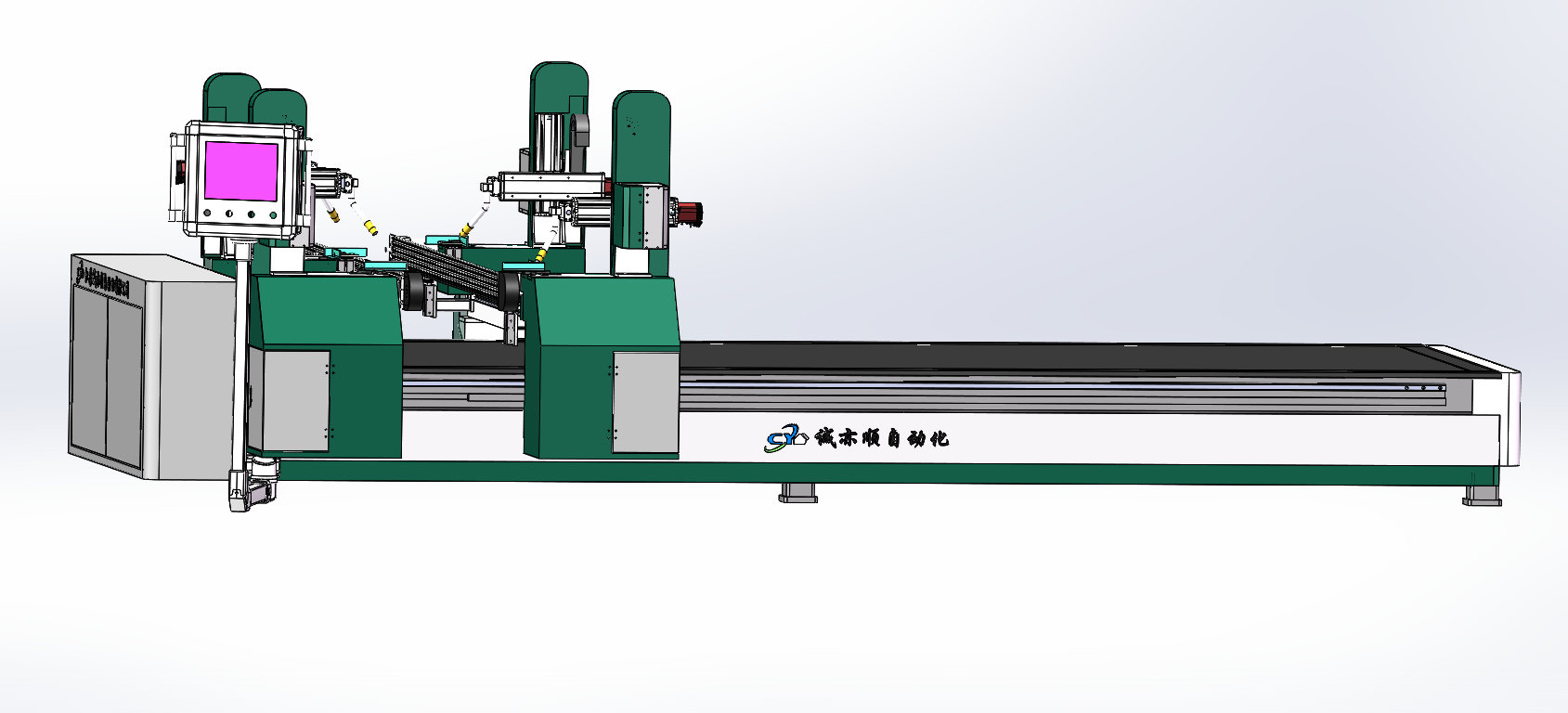
角钢法兰自动焊主要用于制冷风管、地铁通风、建筑通风、暖通及净化功能的角铁法兰不同规格的角焊接,我们有参数化焊接系统,助力臂机械手厂家无需编程,直接输入工件的长度、宽度、厚度就可以直接焊。能够做到四角同时焊,也可以单角或双角同时焊,节约人工,助力臂机械手厂家提高效率,具有速度快、尺寸准确、自动化程度高等特点。设备稳定可24小时工作。

液压上料机械手要完成整个上料过程,需完成夹紧工件、手臂升降、伸缩、回转,助力臂机械手厂家平移等一系列的动作,这些动作都应该在工作拍节规定的时间内完成,具体时间的分配取决于很多因素,助力臂机械手厂家根据各种因素反复考虑,对分配的方案进行比较,才能确定。
助力臂机械手厂家当吸盘发生持续损坏时,项目组立即分析原因,要求设备制造商改换吸盘;其次,设备制造商改换吸盘后,吸盘仍然出现磨损现象,因此,我们要求增加吸盘的保护罩。但保护罩仍不能消除吸盘损坏的情况,然后我们仔细观察了工的操控。助力臂机械手厂家原来员工在设备进行操控时,根本没有按照正确的操控要求进行,也许是为了考虑节省时间,即没有利用好夹具导向的作用,导致每次吸盘被锋利板材划伤的几率大增。在放置完板材后,没有及时将夹具移出拼台,导致吸盘增加了在拼台上被划伤的机会。因此,即规范员工操控、增加吸盘保护装置、使用低成本吸盘,由此,此吸盘容易损坏的问题得到了较好地解决。通过以上案例可以看出,员I的操控,也是影响助力机械臂的设计和使用过程中需要注意的事项。

助力机械手的平衡力各参数根据Excel计算得出后,需要进一步确定气缸运动到每个位置的平衡力大小,并找出极大、极小值。由此可以判断出气缸运动流程力输出的平稳性,助力臂机械手厂家进而验证结构设计的合理性。我们在Excel.上编制了VBA语句,单击计算后,开始运算并采集数据,助力臂机械手厂家得出助力机械手每个位置对应的平衡力大小。助力机械手平衡力数据进而关系到图表选项中,自动生成平衡力与平衡位置的关系图,非常直观的看到,较大平衡力发生在起始位置,最小平衡力大致位于运动的2/3阶段,助力机械手平衡力范围为区间明显。虽然助力机械手平衡力总体成曲线分布,但误差不大,平衡力输出相对稳定,验证了该结构可实现平衡要求。助力机械手平衡条件为:平衡力F=小臂自重+气缸自重+操控部分重量。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号



