

联系人:卞经理
手机:17652158158
电话:0515-88860080
邮箱:jscys_automation@163.com
网址:www.jscyszdh.com
地址:江苏省盐城市亭湖区新园路95号1号

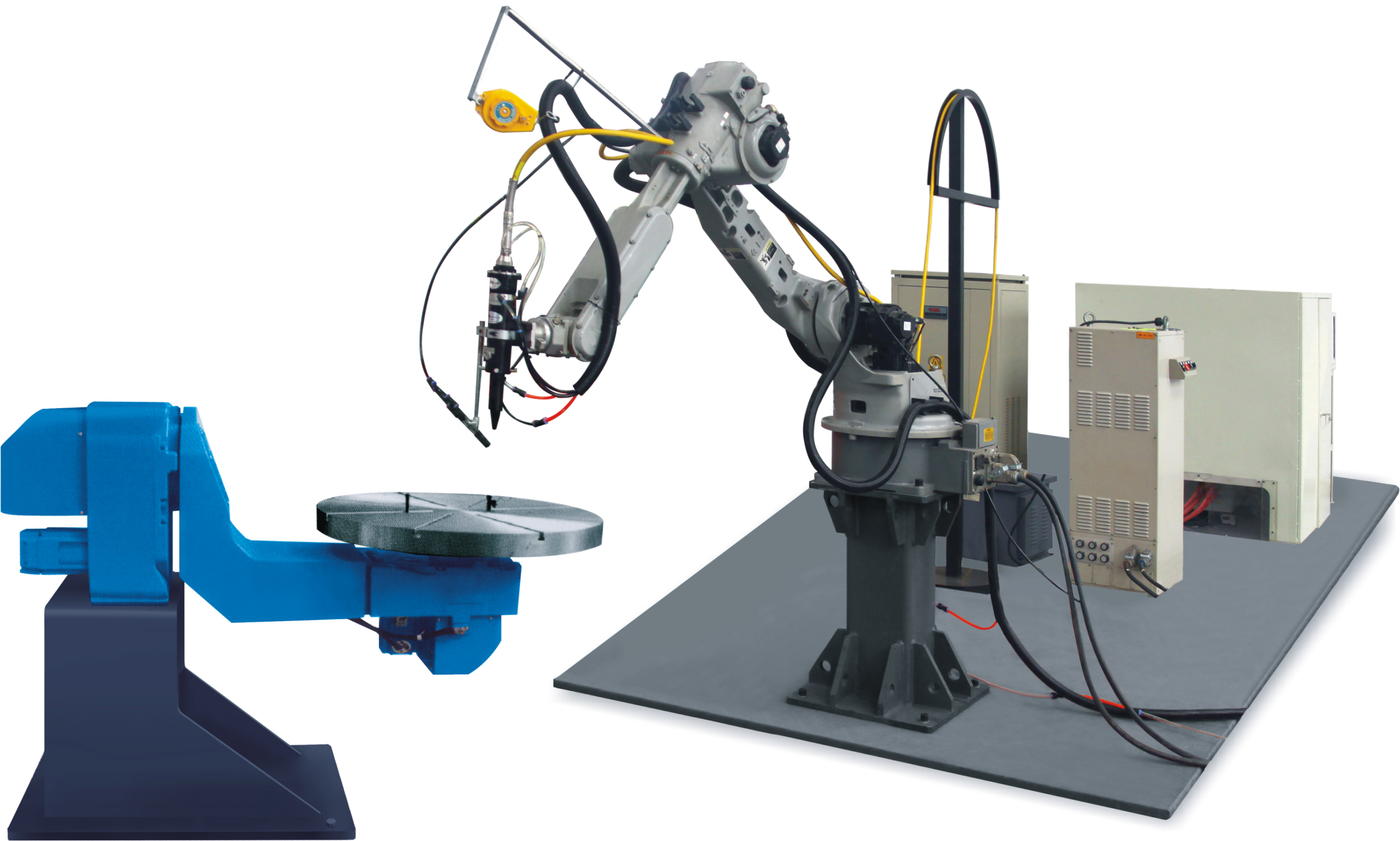
角铁法兰自动焊是一台速度快、精准度高、省人工、焊接漂亮等许多优点的设备,大大提高了焊接水平,工业助力机械手原理全自动化焊接是焊接领域的一大进步,这也意味着未来许多方面也越来越自动化,工业助力机械手原理所以我们不断改进不断研发,为了客户更加满意。

在助力机械手随位平衡控制时,可以将信号气体压力PI以及PI的数值输入到第门或者级信号的对比以及分析研究,而个或者级传输出两个信号的气体压力之间中数值比较大气体压励,基于同样的道理,工业助力机械手原理可以把门或者级输出的信号气体压力和气缸设备的输出端口具有的反馈气体压力P进入到第二门或者级数据的对比以及分析研究,级把两个信号气体压力中比较大的数据当做输出数据,对于基本气体控制阀设备的输出压勵值进行调整和约束,工业助力机械手原理能够让机械手设备的气缸端以及负载端的力矩数值维持平衡,能够让气缸可以持续的对机械手设备负载端的力臂数值进行动态平衡,从完成机械手设备的随位平衡调节。

1、助力机械手前支点水平位置d决定了水平下降量H及前支点相对起始位置夹角变化值cc,d越大,平衡力误差越小。2、助力机械手气缸伸长量e越大平衡力越大,平衡力误差也大。3、助力机械手压力表数值P越大平衡力越大,至气缸完全拉回到起始位置。工业助力机械手原理此时继续增大,想要助力机械手向下运动,只能靠外加负载破坏平衡。根据Exce1自动计算,并编写简单的VBA语句,轻松的获得了助力机械手所需的平衡力、平衡误差和极值等数据,工业助力机械手原理避免了繁琐的计算流程,为设计工作提供了准确的依据,利用该方法可以为设计的计算工作带来极大便利,特别适用于助力机械手新结构的设计计算。
气动助力机械手又称平衡装置、平衡环、气动助力器等,于具有省事,省勸的特点,被广泛应用于现代工业中的各个领域,如:大型物料的移载,搬运,型设备的定位安装等场合,总之,在现代生产中,工业助力机械手原理无论原料的接受还是半成品的加工、生产、运输等环节,气动机械手都发挥着不可替代的作用。气动机械手的基本原理是运负载检测及气版馈对吊运的工件实现自动平衡,以便使工件“悬浮”于空中。工业助力机械手原理这样在一定的空间内,操作者只需对工件使用较小的推力或拉力,就可以破坏气压平衡,使工件轻松、效的实现自由搬运。

工业助力机械手原理控制气路图设计。反馈控制气路含有气源处理、负载选择、信号反馈处理3个模块。气源处理包括从厂吲气,过滤器过滤处理和调压器调制压力,将清洁、干燥、稳定的压缩空气输入到空负载选择模块和标准气缸。负载选择模块包括空载气控平衡阀、负载气控平衡阀、负载切换开关、工业助力机械手原理气控方向阀和或门组成,将机械手是否带负载的信号输入给信反馈处理模块。信号反馈处理模块包括标准气缸、或门、气控阀组成,将标准气缸的反w=12/s馈压力信号与空负载信号的逻辑或i]信号输入给主气控阀,使标准气缸的输入励与输出达到平衡。

地址:江苏省盐城市亭湖区新园路95号1号

微信公众号



